Il rilievo 3D di alcune cisterne interrate
Il Castello Malaspina di Massa è un complesso monumentale con alcune cisterne interrate. Le abbiamo rilevate. I gruppi speleologici locali hanno lavorato con le tecniche di rilievo tradizionale ed io ne rilevate due con uno SLAM. Te ne parlo in questo articolo.
Cinque cisterne. Alcune nascoste sotto un cortile rinascimentale, una allagata, un'altra sigillata da una lastra di pietra che ci vuole una squadra per spostare. Il tutto dentro un castello medievale che ha attraversato quasi mille anni di storia: fortezza, caserma, prigione.
Questo è il contesto in cui mi sono trovato quando il Gruppo Speleologico e ArcheologicoApuano mi ha coinvolto nella fase finale del suo progetto di rilievo.
Loro il lavoro lo avevano già avviato. Io sono arrivato dopo, con la tecnologia SLAM e l'idea di documentare tutto per farne un contenuto utile.
In questo articolo racconto com'è andata: prima quello che hanno fatto loro, poi quello che ho fatto io, e alla fine perché le due cose messe insieme danno un risultato che nessuna delle due avrebbe dato da sola.
Come è nato il progetto (e chi lo ha davvero avviato)
Il merito dell'intuizione iniziale va a Nadia Ricci, Presidente della Federazione Speleologica Toscana. Durante una visita guidata al Castello Malaspina di Massa nel 2023, si accorge dell'esistenza di queste cinque cisterne interrate. Ambienti dimenticati, mai mappati sistematicamente, nascosti sotto i pavimenti di un castello che ormai la maggior parte delle persone conosce solo come monumento da visitare.
La Federazione Speleologica Toscana ha come missione studiare, rilevare e valorizzare cavità naturali e artificiali. Queste cisterne erano esattamente il loro terreno. Nadia attiva i contatti con la Soprintendenza competente, ottiene le autorizzazioni, coinvolge il Comune di Massa. Il progetto prende forma nel 2023 ma arriva in campo solo nel 2025 — i cantieri già in corso nel castello bloccano tutto fino a quella data.
Le cinque cisterne hanno caratteri molto diversi tra loro. Due si riconoscono subito grazie alla presenza di pozzi marmorei che emergono dal pavimento del cortile. Una, la più grande, è nascosta sotto il cortile rinascimentale ed era chiusa da una lastra di pietra massiccia. Una si trova nella rocca medievale. L'ultima è parzialmente allagata — circa un metro d'acqua sul fondo — e si affaccia all'esterno del cortile rinascimentale.
Architettonicamente sono ambienti semplici: camere quadrangolari con soffitto a botte, laterizio, rivestimento in malta idraulica. Piccole, buie, difficili da raggiungere.


Il rilievo speleologico: il lavoro fatto prima di me
La mappatura geometrica di base è stata condotta dal Gruppo Speleologico Archeologico Apuano, con il supporto della sezione Speleo Subacquea Toscana per la cisterna allagata.
Lo strumento principale è un distanziometro laser adattato per uso speleologico: ad ogni punto registra una tripletta — distanza, inclinazione e azimut. Avanzando da un caposaldo all'altro si costruisce una poligonale, che idealmente si chiude ad anello per poter verificare la precisione finale del rilievo.
I dati vengono trasmessi via Bluetooth all'applicazione Toproid sullo smartphone. Mentre si misura, si disegna direttamente in campo uno schizzo con bordi, pareti e soffitto della cisterna. In ufficio poi si producono i volumi tridimensionali di massima, e da lì si esportano su CAD piante, sezioni, calcolo delle volumetrie e indicazione dei materiali.
Per la cisterna allagata il laser non si poteva usare. È intervenuta la squadra speleo-subacquea, con il supporto dell'associazione Orca Loca Sub, che ha eseguito un rilievo tradizionale: cordella metrica, bussola subacquea, profondimetro per calcolare i dislivelli. Lento e laborioso, ma l'unico metodo applicabile in quella situazione.
Questo lavoro è la base di tutto. Senza di loro il progetto non sarebbe mai partito, e senza quei dati il mio contributo successivo avrebbe avuto meno contesto in cui inserirsi.




Come sono entrato io, e perché
Mi sono interessato a questo progetto per una ragione molto pratica: ero convinto che ci fosse un caso d'uso interessante per lo SLAM in un contesto come questo, e volevo documentarlo.
Ho una partnership con Emesent per la creazione di contenuti tecnici sull'Hovermap, e quello delle cisterne era esattamente il tipo di scenario su cui ha senso testare i limiti dello strumento — spazi confinati, ambienti complessi, acqua, buio totale. Ho proposto di aggiungere una fase di rilievo SLAM al progetto, e i gruppi speleologici hanno accettato.
Il mio obiettivo era duplice: portare un layer tridimensionale ad alta definizione che contestualizzasse le cisterne rispetto all'intero complesso del castello, e ricavarne un contenuto utile per chi lavora con questa tecnologia.


Il rilievo SLAM: quello che ho fatto io
Ho usato il sistema Emesent Hovermap ST, che sfrutta algoritmi SLAM (Simultaneous Localization and Mapping). Lo strumento scansiona l'ambiente in tempo reale, determina la propria posizione in base alle geometrie rilevate man mano, e funziona in totale oscurità. Non ha bisogno di GPS. Non ha bisogno di luce. Ha bisogno di geometrie: angoli, pareti, variazioni di forma.
Ho lavorato su due cisterne con approcci diversi, dettati dalle condizioni fisiche di ciascuna.
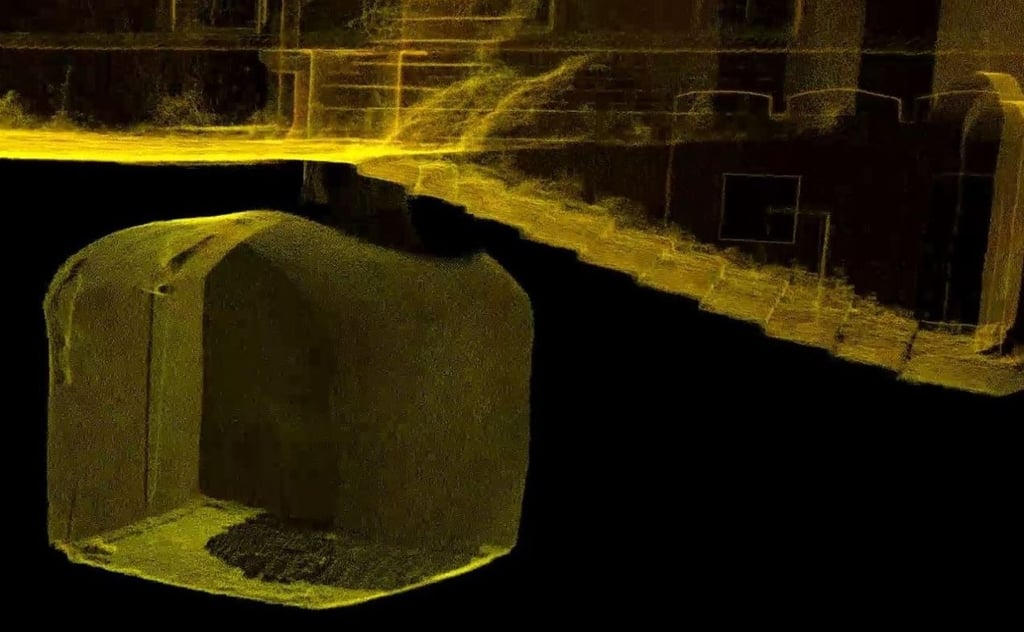
Metodo 1: dall'alto, senza entrare
Per la prima cisterna ho fissato lo scanner capovolto alla testa di un'asta telescopica usando delle fascette, e l'ho calato lentamente attraverso il pozzo d'ingresso. Nessun operatore è sceso.
Il vantaggio è chiaro: si evita completamente l'ingresso in uno spazio confinato. Il limite è altrettanto chiaro: lo scanner vede solo ciò che è visibile dal punto di calata. Qualsiasi ostacolo, muro o sporgenza crea zone d'ombra che restano non scansionate.
Il momento più delicato è stato il passaggio attraverso l'imbocco stretto del pozzo: bisogna muoversi molto lentamente per non far perdere l'orientamento geometrico allo strumento. Lo SLAM "capisce" dove si trova in base alla continuità delle forme rilevate — se si muove troppo velocemente in un punto con poche geometrie di riferimento, perde il filo.




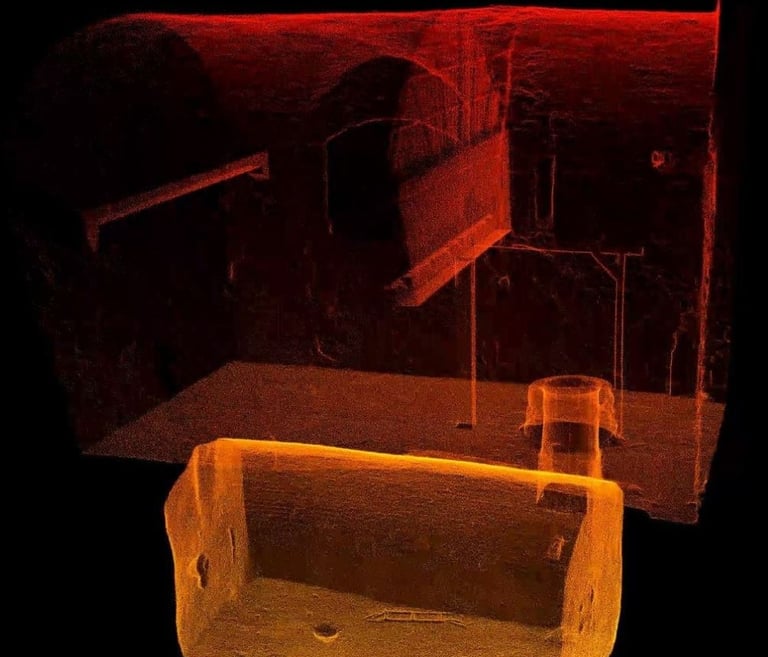
Metodo 2: l'operatore scende dentro
Nella seconda cisterna mediante una scala alcuni operatori speleo sono entrati nella cisterna e lo scanner è stato passato dall'alto tramite un'asta estesa e portato a mano dentro il volume.
Il risultato in termini di completezza è nettamente superiore: si riesce a orientare lo strumento in tutte le direzioni, a coprire ogni angolo, a eliminare quasi completamente le zone d'ombra.




Cosa si porta a casa da un progetto così
La lezione più importante non è tecnica. È metodologica.
Non esiste uno strumento che fa tutto. Lo SLAM copre geometrie tridimensionali complesse in tempi rapidi, ma non entra nell'acqua. Il distanziometro speleologico costruisce la poligonale con precisione, ma ha i suoi limiti con le interferenze elettromagnetiche. L'immersione speleo-subacquea è lenta e richiede attrezzatura specifica, ma è l'unico metodo quando il fondo è allagato.
La qualità del risultato finale dipende dalla capacità di capire quale strumento serve e dove — e di far lavorare metodologie diverse in modo integrato, senza che una cancelli il lavoro dell'altra.
In questo progetto ogni fase aveva senso perché si appoggiava a quella precedente. I gruppi speleo hanno costruito la base. Io ho aggiunto un layer che senza di loro non avrei avuto contesto in cui inserire.


Guarda il video
Ho documentato l'intera fase di rilievo SLAM in un video sul mio canale — con le soluzioni adottate, i problemi incontrati sul campo e i risultati. Se vuoi vedere come funziona in pratica questo tipo di lavoro, il video è il posto giusto da cui partire.

www.3dmetrica.it © 2026
3DMetrica di Ing. Paolo Corradeghini
Via Bertoloni, 59 - 19038 - Sarzana (SP)
PIVA 01260880115
email paolo.corradeghini@3dmetrica.it
pec paolo.corradeghini@pec.it
Ai sensi delle disposizioni in merito a pubblicità e trasparenza su contributi e finanziamenti, comunico di aver beneficiato di quanto segue:
Soggetto erogatore: FILSE - Finanziaria ligure per lo sviluppo economico - Oggetto: Bando per la digitalizzazione delle micro, piccole e medie imprese - Anno: 2024 - Somma: 15.045,73 € - Impiego: Sistema SLAM Emesent Hovermap ST
Soggetto erogatore: FILSE - Finanziaria ligure per lo sviluppo economico - Oggetto: Bando per la digitalizzazione delle micro, piccole e medie imprese - Anno: 2022 - Somma: 9.727,20 € - Impiego: DJI Phantom 4 RTK, Trimble Real Works, InstaPro2
Soggetto erogatore: FILSE - Finanziaria ligure per lo sviluppo economico - Oggetto: Bando per la digitalizzazione delle micro, piccole e medie imprese - Anno: 2021 - Somma: 4.772,40 € - Impiego: Workstation Desktop, Workstation Laptop