SLAM e Topografia
Si può usare uno SLAM per ricavare informazioni topografiche del terreno? Sì ma serve fare attenzione ad un po' di cose...


Ti è mai capitato di dover mappare un’area, con l'asfalto tutto rovinato e pieno di avvallamenti, e scoprire che non puoi volare col drone?
È quello che è successo a me: 200 metri per 50 di pavimentazione da analizzare nel dettaglio, tempi strettissimi per le autorizzazioni UAV e la necessità di una nuvola di punti densa, continua, un vero "tappeto" di dati.
In questo post ti racconto un caso pratico dove ho scelto di lasciare il drone nello zaino e affidarmi allo SLAM.
Ma attenzione: non è tutto "punta e cammina".
Ti spiego come l'ho gestito, dalla rete di controllo in campo alla post-elaborazione, per ottenere precisioni topografiche.


Quando lo SLAM è la scelta giusta (e quando no)
Non sono un fanatico di una singola tecnologia: scelgo lo strumento in base all'obiettivo.
Per questo lavoro serviva continuità spaziale.
Ho valutato le alternative e le ho scartate quasi subito:
GNSS RTK: Preciso, ok, ma troppo discontinuo. Per capire la morfologia di un cedimento stradale non puoi battere un punto ogni 2 metri, ti serve la superficie completa.
Laser Scanner Statico: Risultato eccellente, ma quante stazioni avrei dovuto fare per coprire tutto senza zone d'ombra? Troppe. Sarei ancora lì a spostare il treppiede (io ho uno scanner lento).
Stazione Totale: Lasciamo perdere... troppo lento per questo livello di densità (anche se molto precisa!).
La scelta è caduta sullo SLAM mobile (nello specifico un Emesent Hovermap ST): un ottimo compromesso tra densità del dato, accuratezza e, soprattutto, velocità.
Il segreto è a terra: Target e Rete di Controllo
Se vuoi fare topografia seriamente con uno SLAM, non puoi fidarti solo dell'algoritmo.
Serve una rete di controllo solida.
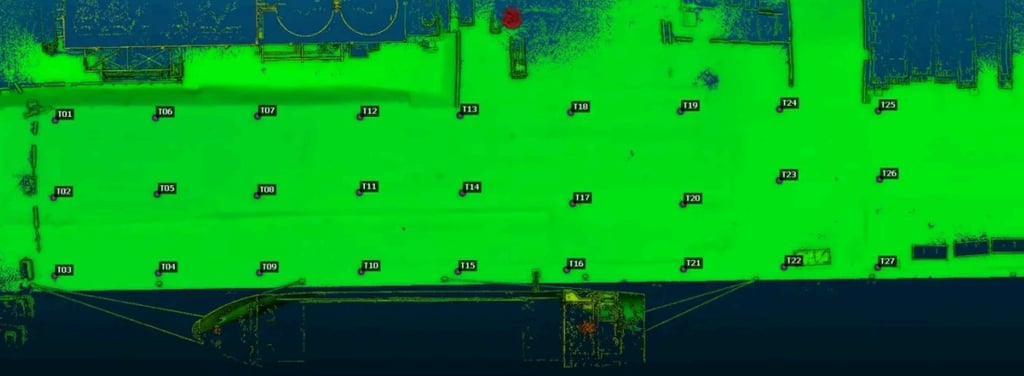
Ho posizionato 30 target rigidi in PVC seguendo una griglia regolare: tre file lungo l'area, con un marker ogni 20 passi circa.
Le coordinate? Le ho rilevate con un'antenna GNSS RTK collegata alla rete VRS Pegaso Now.
Nota tecnica: Una buona distribuzione dei target è importante.
Alcuni serviranno come GCP (Ground Control Points) per "sistemare" la scansione, altri come Checkpoint indipendenti per dirci, in modo onesto, quanto abbiamo sbagliato.
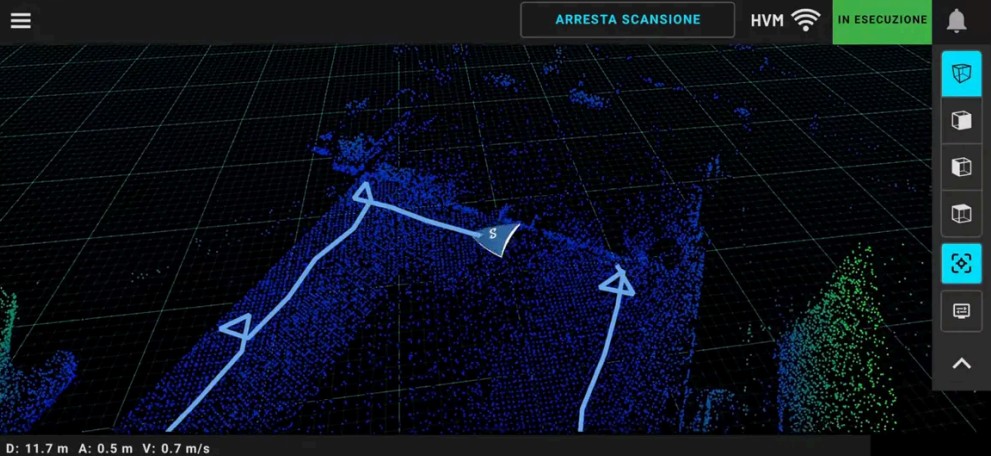
"L'arte di camminare": la strategia di acquisizione
Come ti muovi sul campo decide la qualità della tua nuvola.
Per coprire l'ettaro ho seguito uno schema a "tessellazione":
Loop esterno: Un grande anello lungo tutto il perimetro dei target.
Zig-zag interno: Movimenti diagonali per incrociare i dati e chiudere continuamente i "loop".
Focus sulle criticità: Passaggi extra nelle zone con depressioni marcate.
Ho tenuto lo scanner a mano, orientandolo verso il basso e muovendo il braccio lateralmente. Perché? Per massimizzare la densità proprio sulla pavimentazione.
E quando arrivavo su un target, ci giravo intorno a circa 1.5 metri di distanza: questo rende il centro del target chiarissimo nei dati di intensità in ufficio.



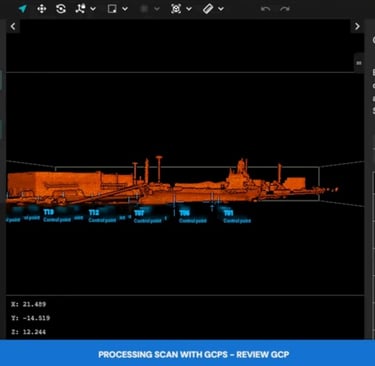
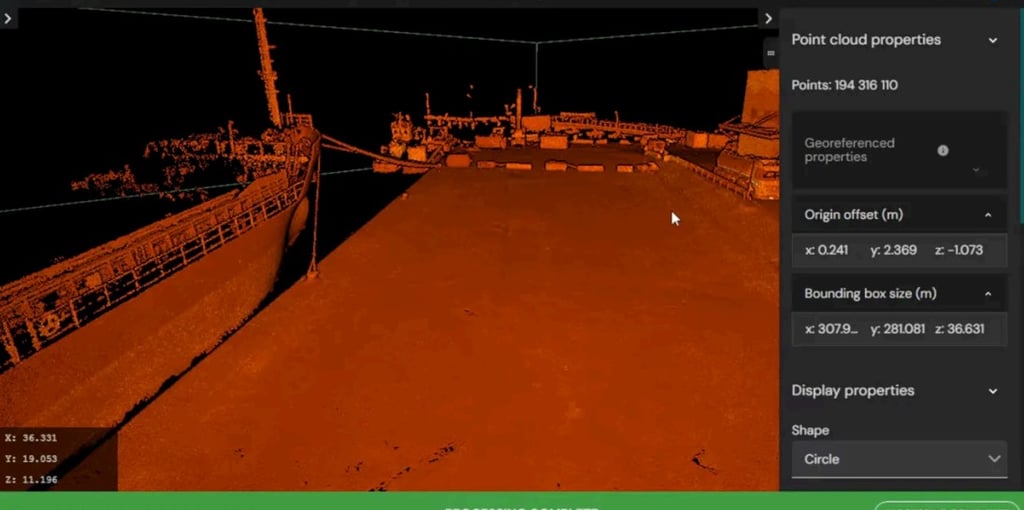
Post-elaborazione: oltre la semplice "roto-traslazione"
Una volta in ufficio, i dati sono passati dentro Emesent Aura.
Qui avviene la magia (e la correzione degli errori).
Il punto cruciale non è solo spostare la nuvola sui punti GNSS.
Il software esegue un aggiustamento avanzato che corregge i micro-drift e le deformazioni locali della traiettoria.
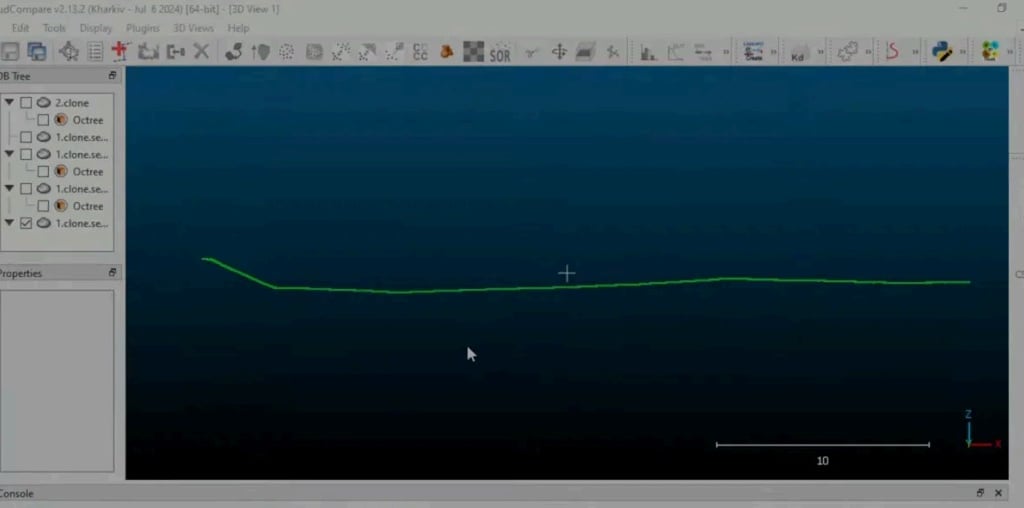
Se prendi una nuvola SLAM "nuda" e provi ad allinearla solo con una roto-traslazione rigida (magari in CloudCompare), non correggerai mai le distorsioni interne.
Per i risultati attesi serviva un software che masticasse i GCP in fase di processing.

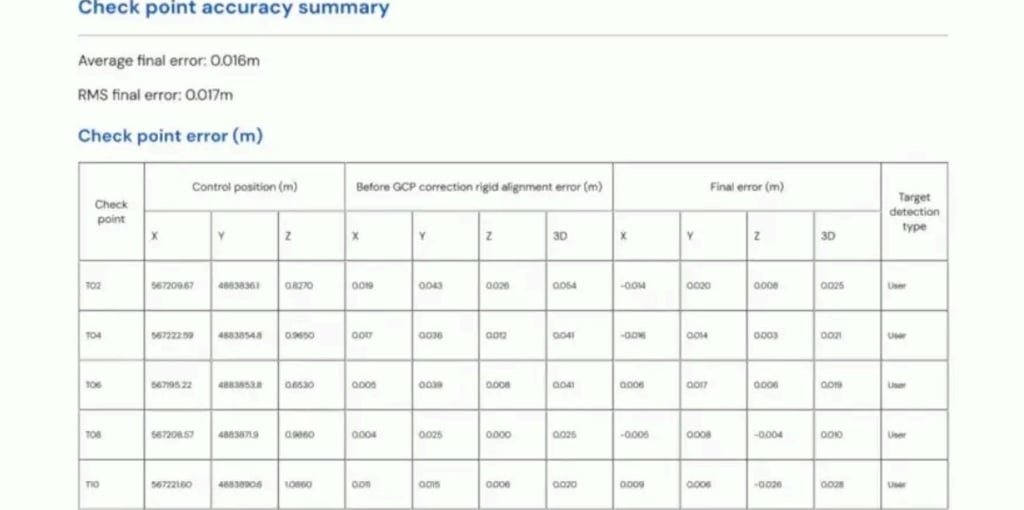
Numeri alla mano: quanto è accurato?
Dopo circa 2 ore di calcolo (il quadruplo del tempo speso in campo), ecco i risultati del report di accuratezza:
Errore medio sui Checkpoint: ~1.6 cm
RMS Error: ~1.7 cm
Siamo perfettamente nel range dei risultati attesi ed accettabili per superfici carrabili di questo tipo
Ho analizzato la nuvola anche in CloudCompare: in un metro quadro ho trovato circa 11.000 punti.
Il rumore?
Quasi tutto sub-centimetrico, con qualche picco isolato a 2 cm.
Un dato pulito, denso e pronto per essere trasformato in planimetrie e sezioni.



Consigli pratici se vuoi usare lo SLAM
Progetta prima: La rete di GCP va pensata a tavolino, non a caso mentre cammini.
Scanner a mano: Se il target è il suolo, il trasporto a mano batte lo zaino (hai più controllo sul sensore).
Monitora in tempo reale: Usa l'app per vedere dove stai passando. Non c'è niente di peggio che tornare in ufficio e scoprire un "buco" nella nuvola.
GCP sempre e comunque: Anche se lo scanner ha il GNSS integrato, i target a terra sono la tua unica vera assicurazione sulla qualità.
Conclusioni
Quindi, si può fare topografia con uno SLAM?
Sì, ma serve attenzione.
Serve un hardware che non "deragli", una procedura di campo rigorosa e un software che sappia correggere i dati.
In questo caso, lo SLAM mi ha permesso di consegnare un lavoro che con altri strumenti avrebbe richiesto molto più tempo, mantenendo un'accuratezza in linea con gli obiettivi.
Questo post viene fuori dal video del racconto che trovi qui sotto

www.3dmetrica.it © 2026
3DMetrica di Ing. Paolo Corradeghini
Via Bertoloni, 59 - 19038 - Sarzana (SP)
PIVA 01260880115
email paolo.corradeghini@3dmetrica.it
pec paolo.corradeghini@pec.it
Ai sensi delle disposizioni in merito a pubblicità e trasparenza su contributi e finanziamenti, comunico di aver beneficiato di quanto segue:
Soggetto erogatore: FILSE - Finanziaria ligure per lo sviluppo economico - Oggetto: Bando per la digitalizzazione delle micro, piccole e medie imprese - Anno: 2024 - Somma: 15.045,73 € - Impiego: Sistema SLAM Emesent Hovermap ST
Soggetto erogatore: FILSE - Finanziaria ligure per lo sviluppo economico - Oggetto: Bando per la digitalizzazione delle micro, piccole e medie imprese - Anno: 2022 - Somma: 9.727,20 € - Impiego: DJI Phantom 4 RTK, Trimble Real Works, InstaPro2
Soggetto erogatore: FILSE - Finanziaria ligure per lo sviluppo economico - Oggetto: Bando per la digitalizzazione delle micro, piccole e medie imprese - Anno: 2021 - Somma: 4.772,40 € - Impiego: Workstation Desktop, Workstation Laptop